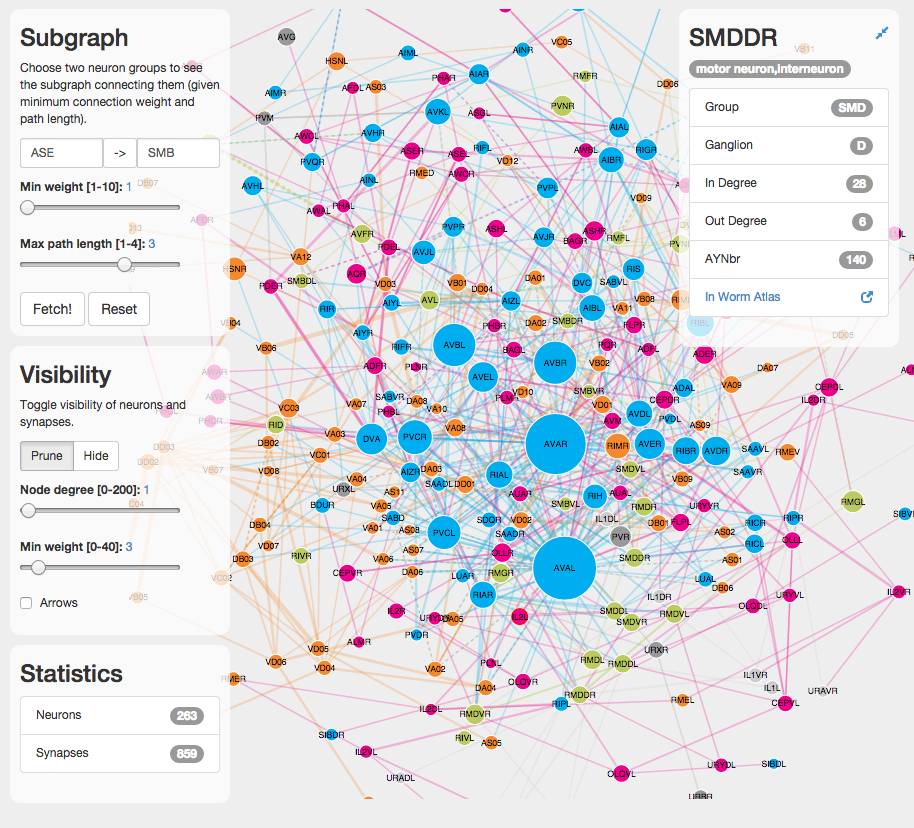
I’ve build a prototype visual exploration tool for the connectome of c. elegans. The data describing the worm’s neural network is preprocessed from publicly available information and stored as a graph database in neo4j. The d3.js visualization then fetches either the whole network or a subgraph and displays it using a force-directed layout (for now).